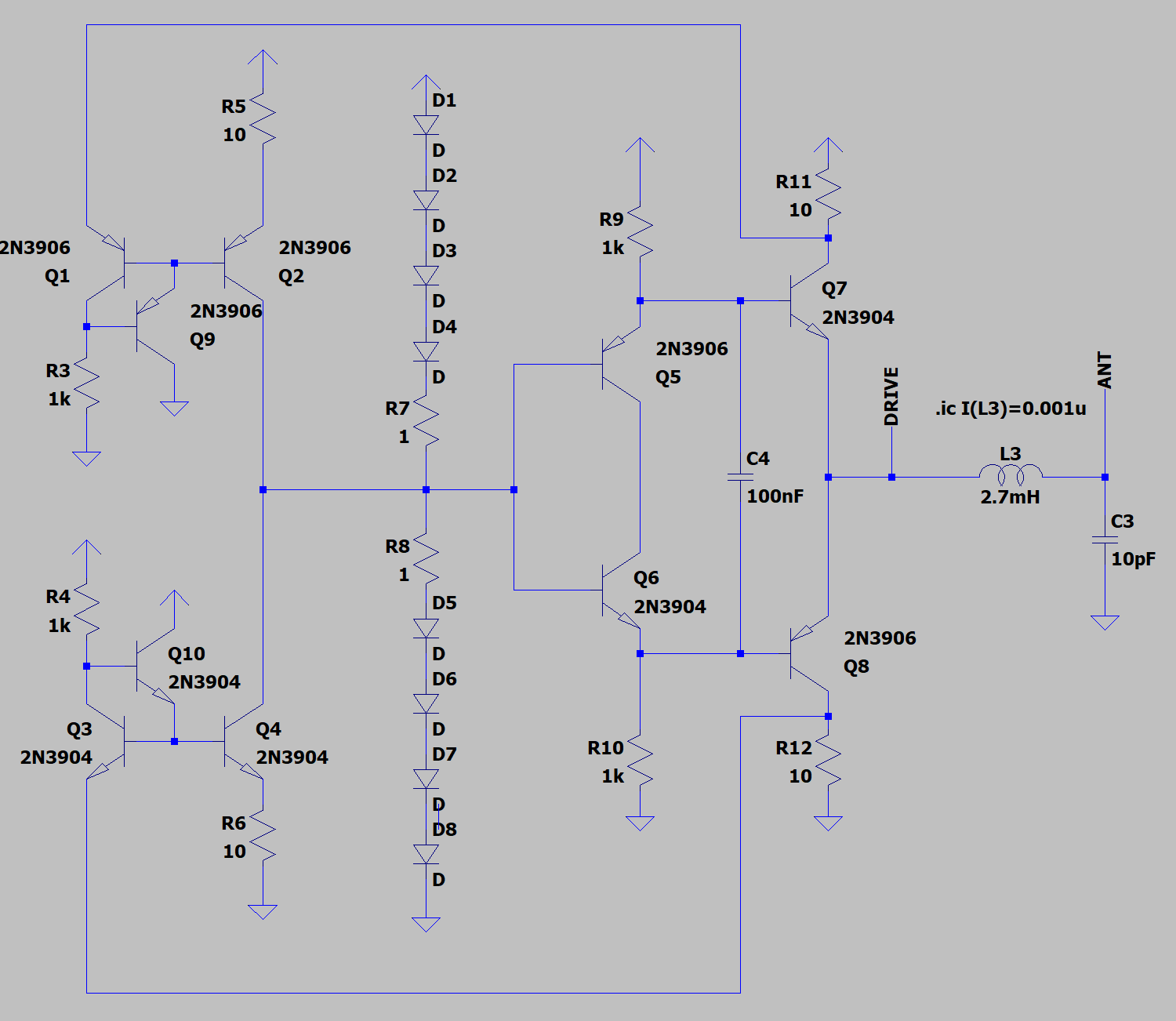
Yet another current sensing oscillator on BJTs.
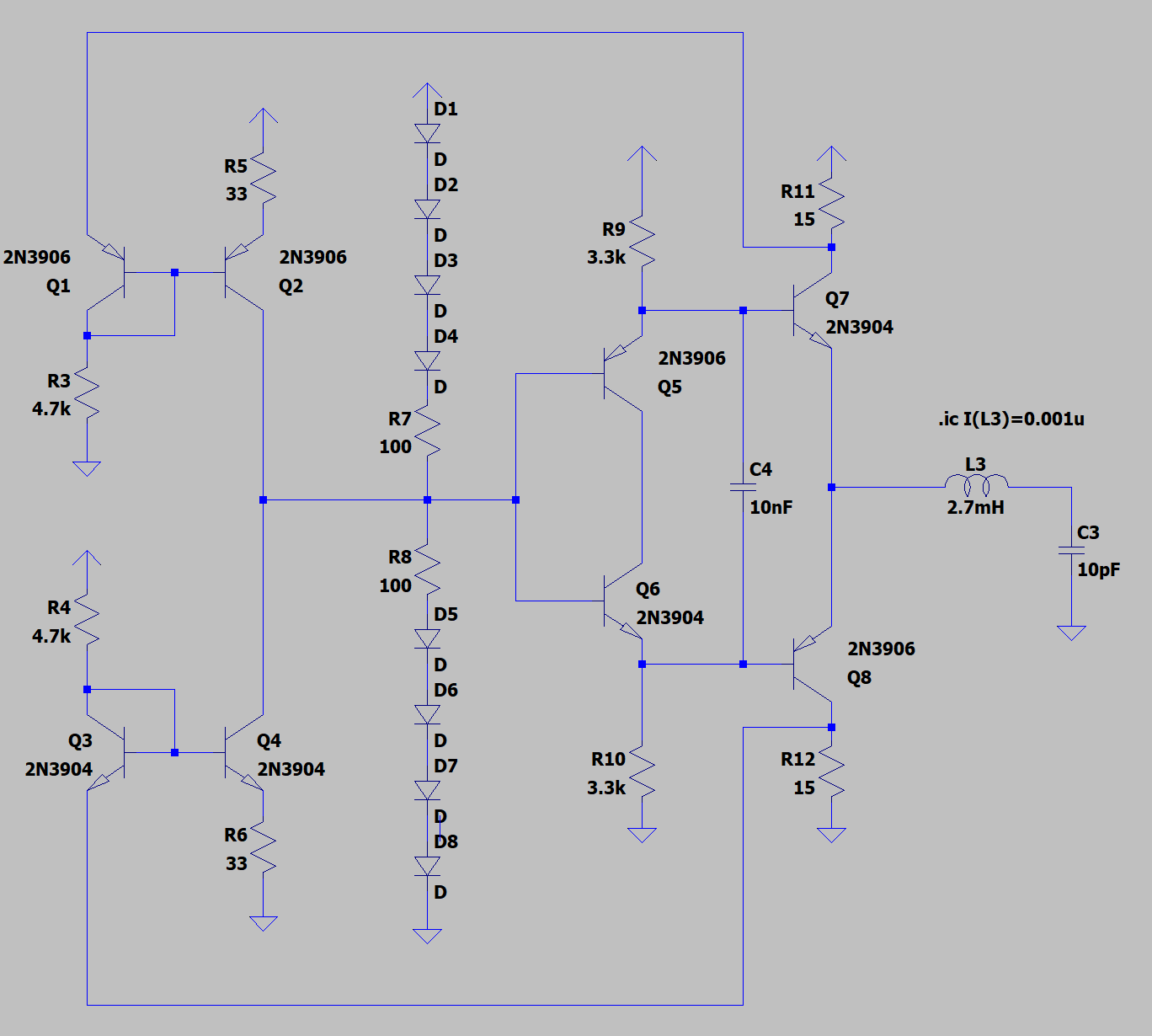
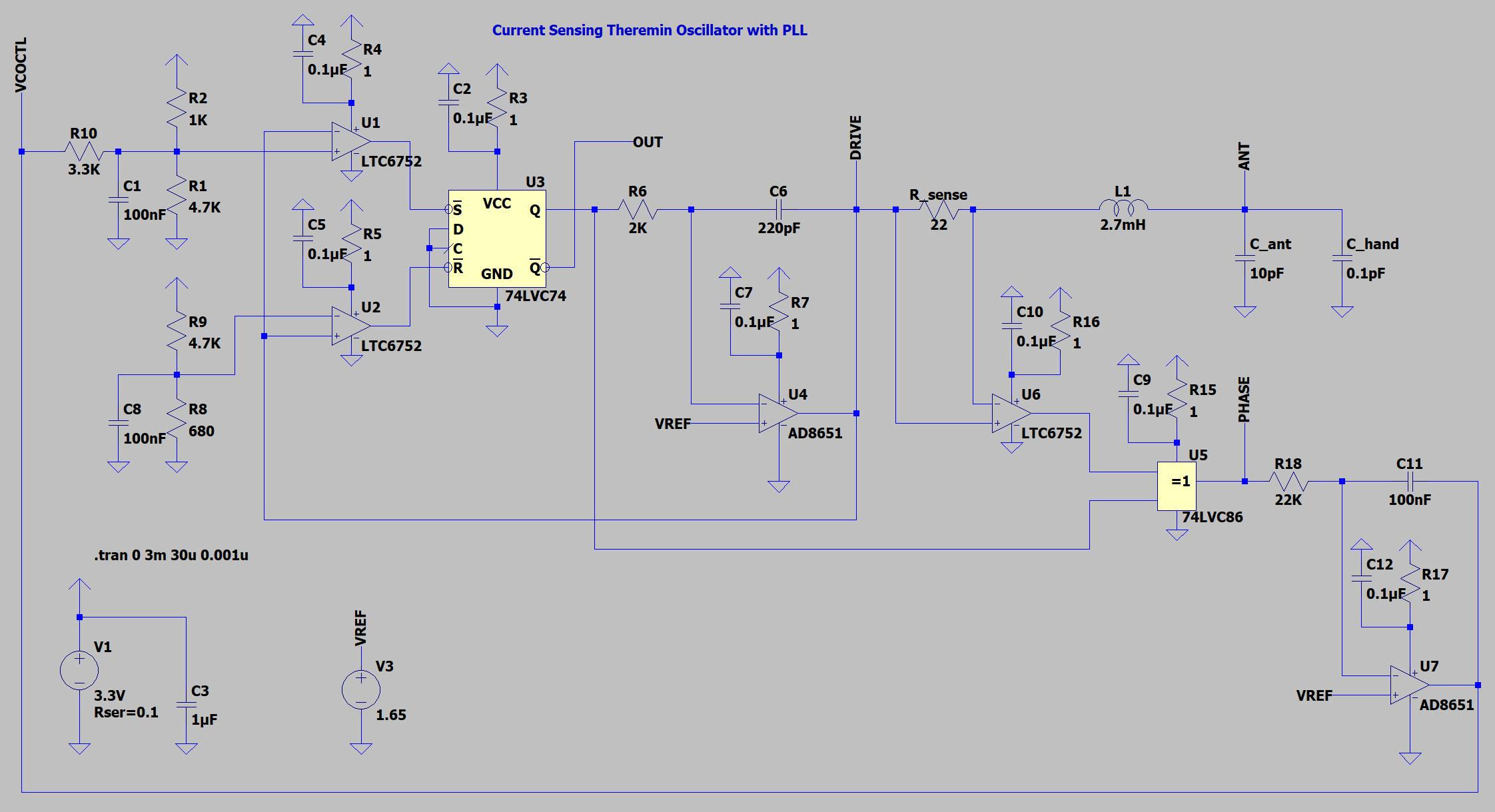
Drive cascade mostly borrowed from dewster's diff amp oscillator.
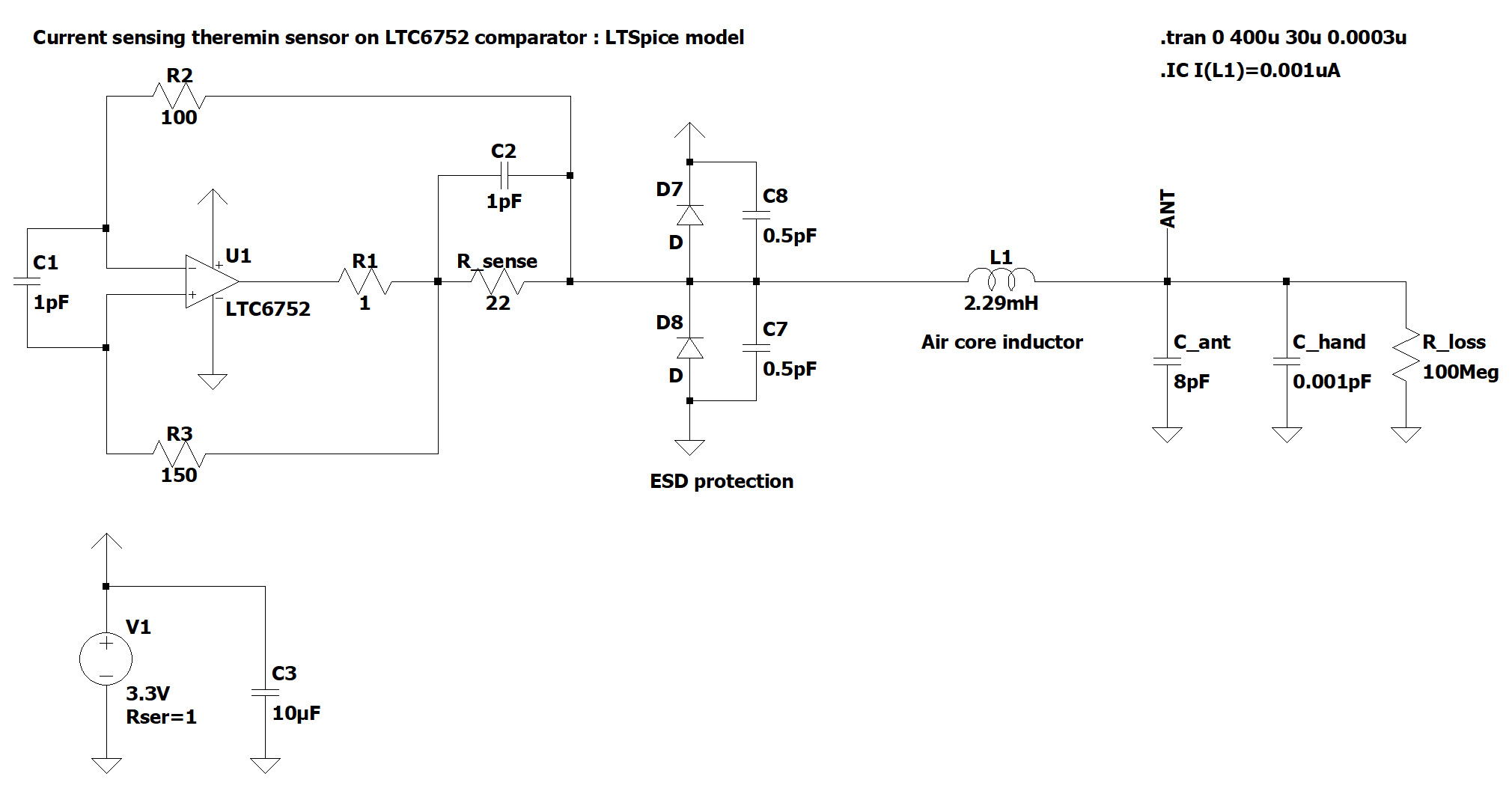
The difference is a location of R_sense. Sensing resistors are placed between output cascade and power rails.
Instead of differential amplifier, current sensing is implemented using current mirrors. One mirror senses from 3.3V rail, second one - from 0V rail.
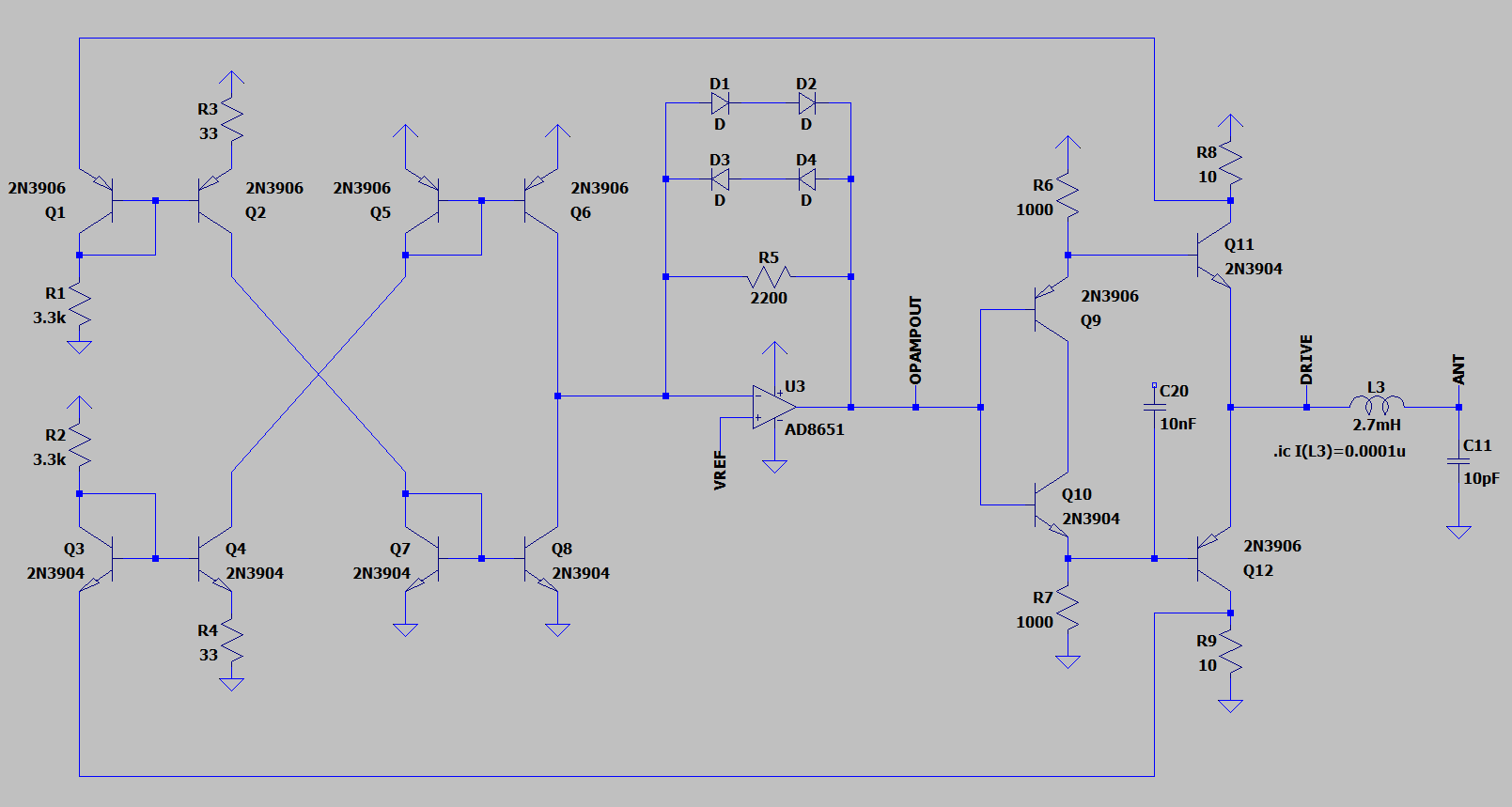
Current sensing from rails is pretty simple, comparing to BJT differential amplifier.
Mirror outputs are being combined, to obtain difference between top and bottom rail currents. It's equal to LC tank current.
Main challenge is to keep phase error (amplifier delay) as small as possible.
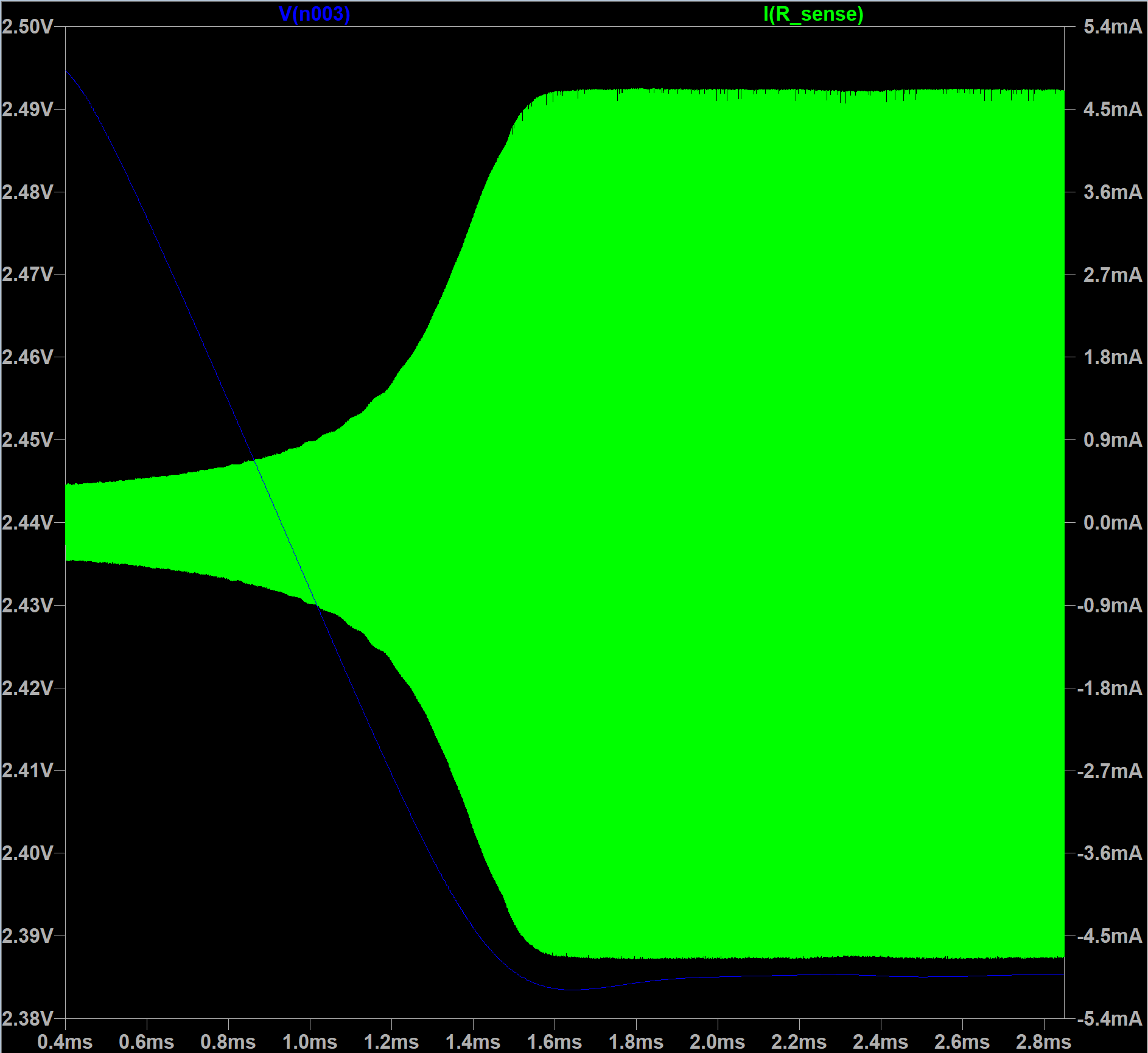
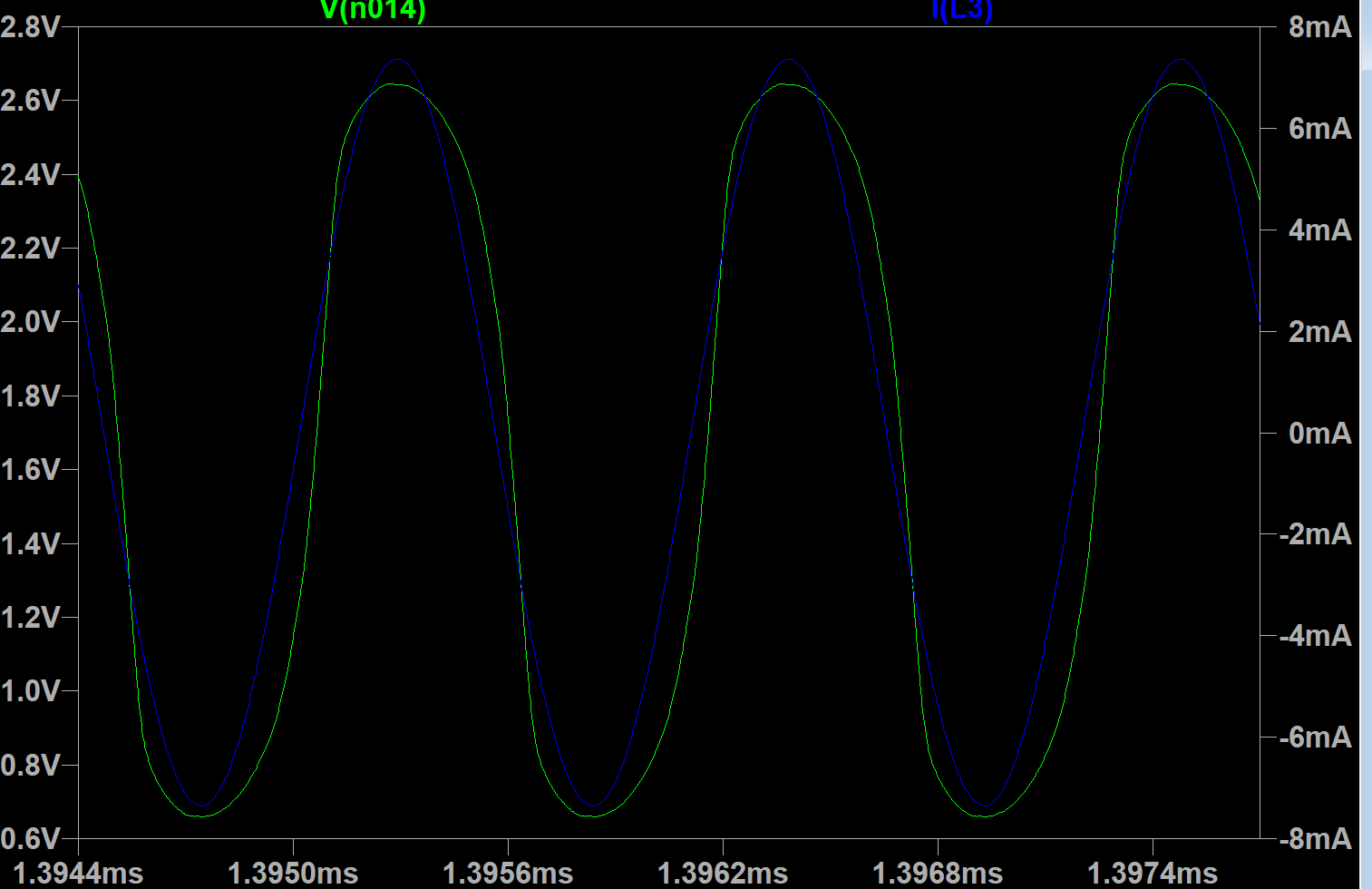
While offered current is fully consumed from current mirror output, delay is small enough.
But if output current is not consumed, delay appears.
I've added diode based limiter, to source/sink mirror output current when sense output voltage is close to power rail.
spice model: download link
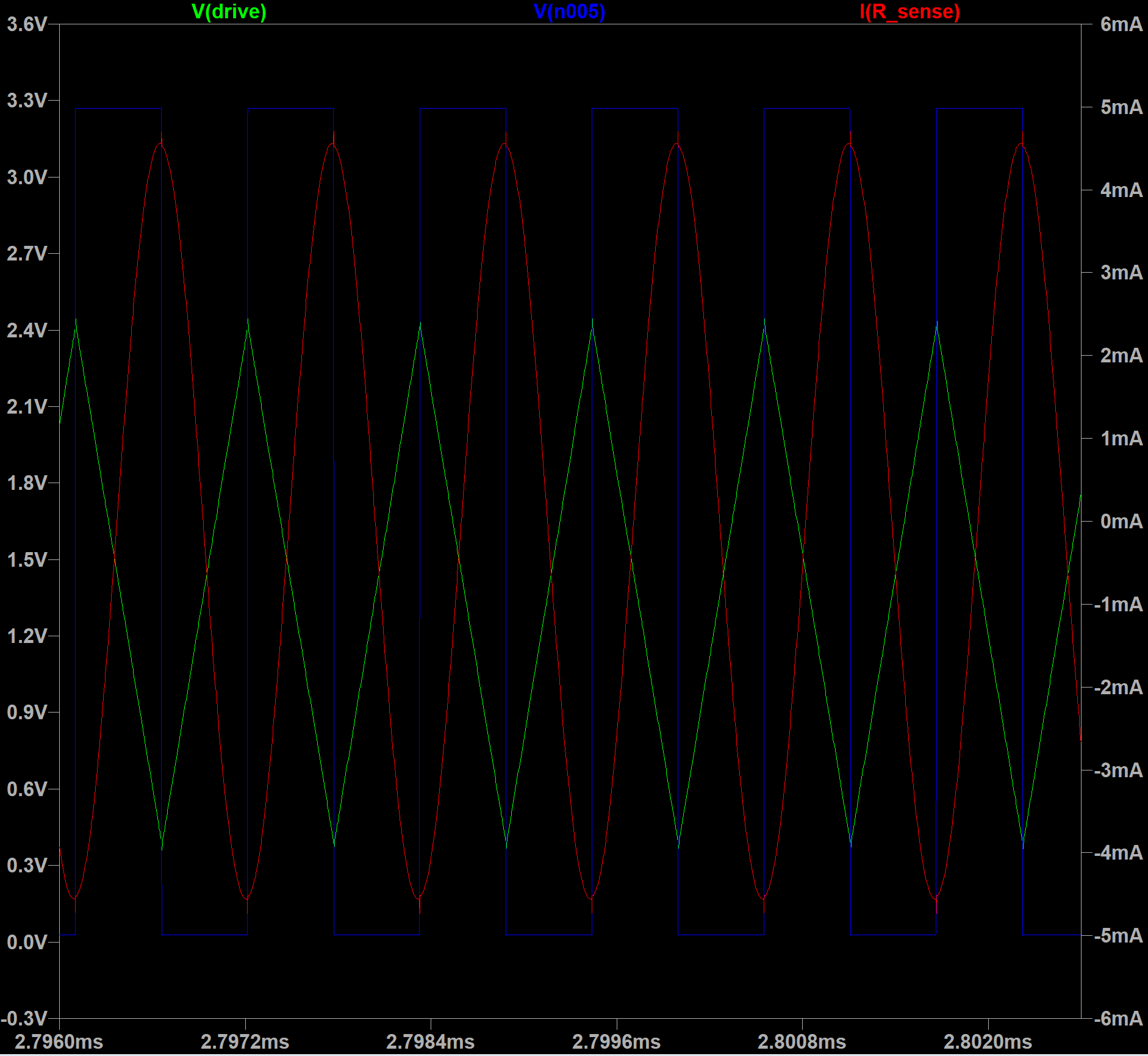
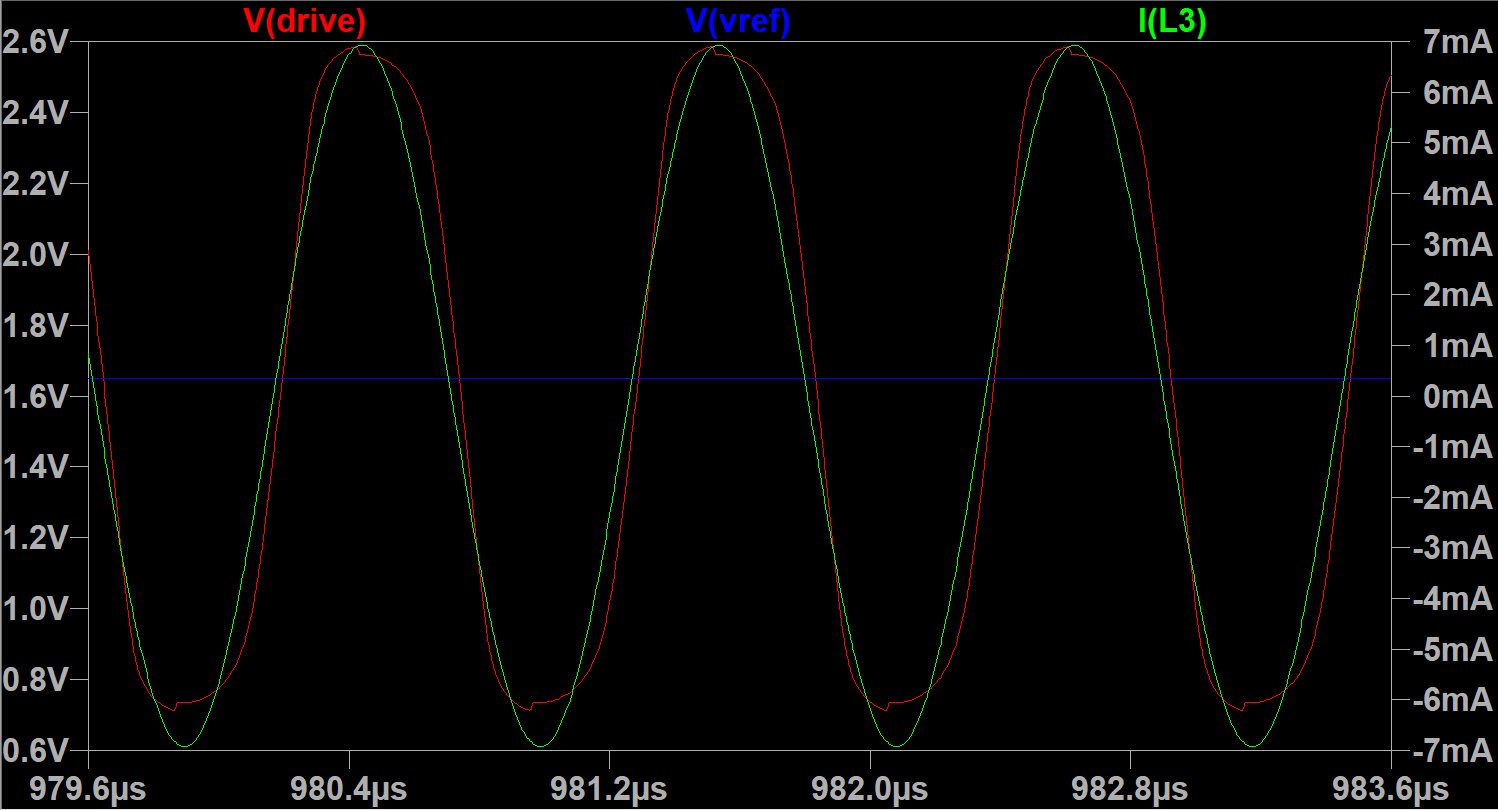
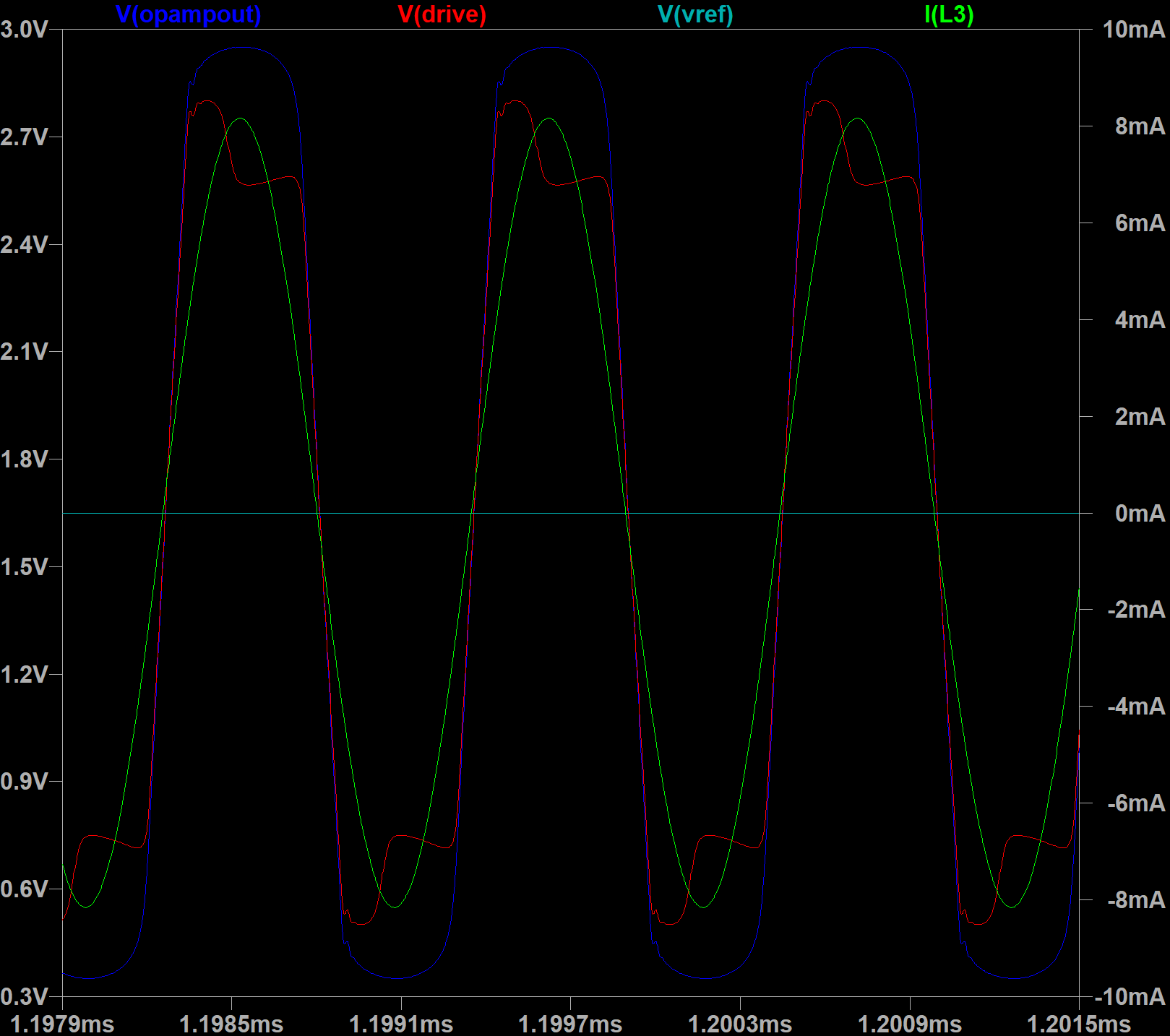
Drive signal and LC tank current:
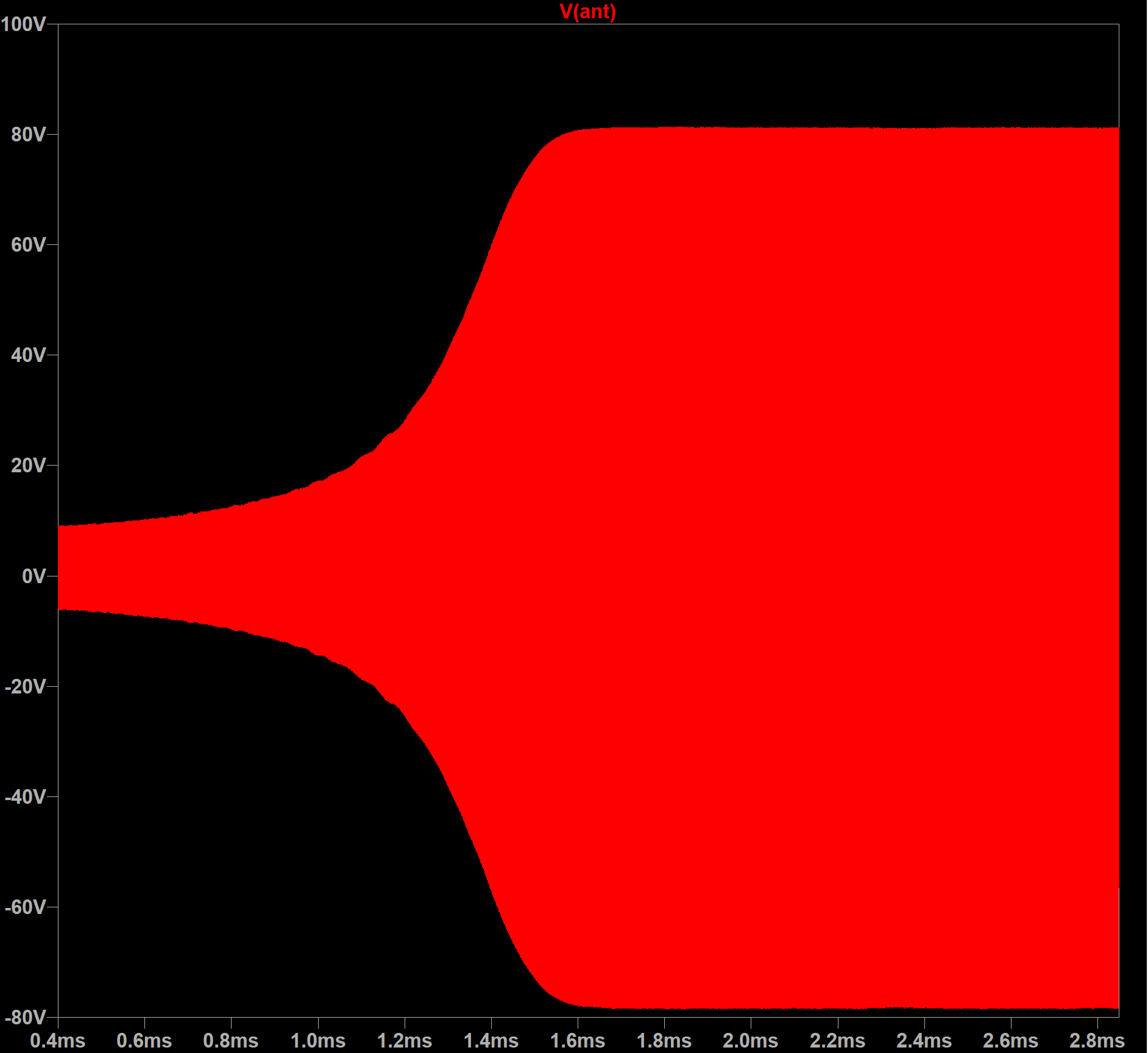
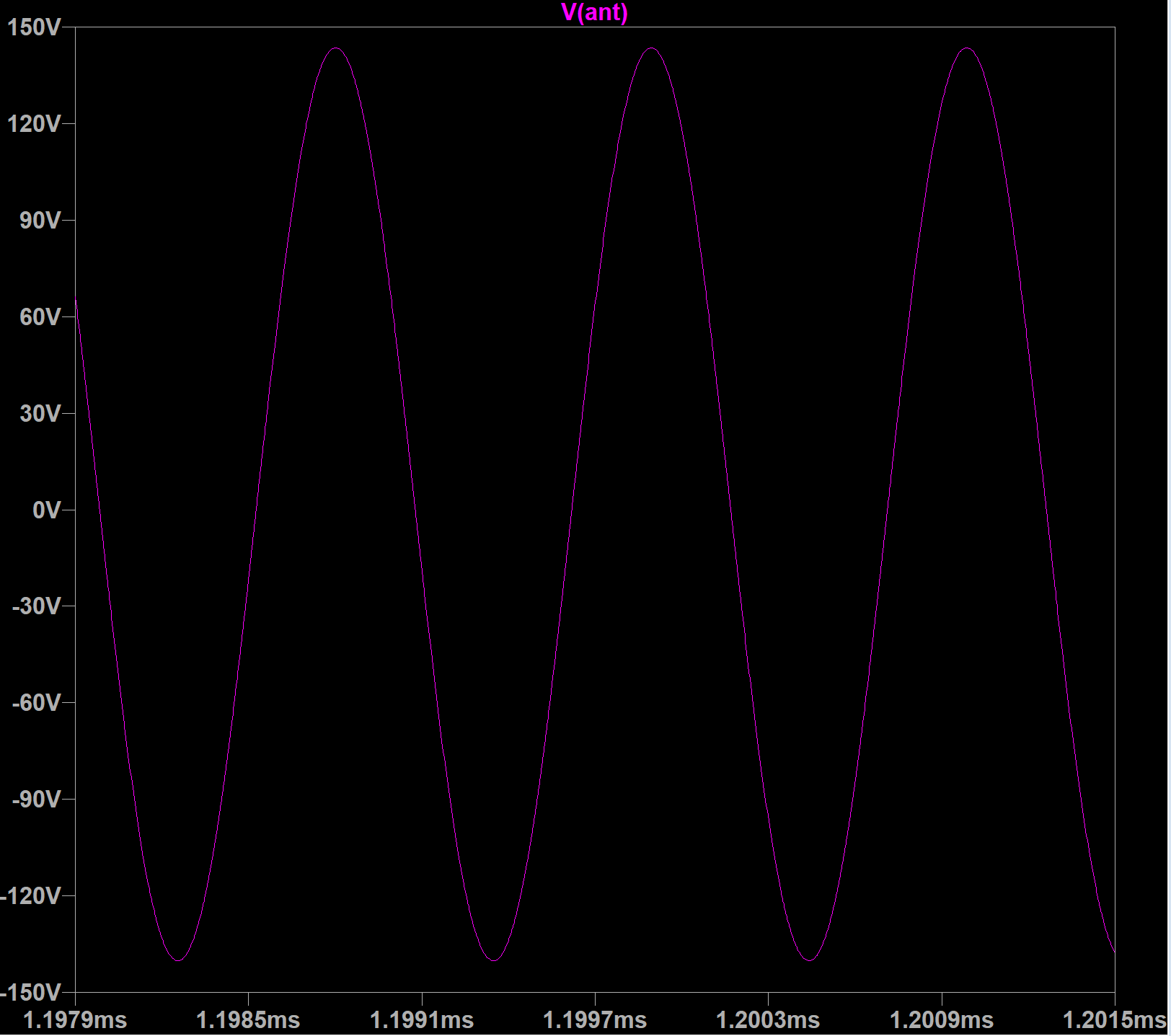
Voltage swing depends on inductor and LC tank Q.
With 2.7mH R_ser=120 Ohm, C_par=1.5pF -- antenna voltage swing is 250 Vpp
With 2.7mH R_ser=60 Ohm, C_par=1.5pF -- antenna voltage swing is 700 Vpp
With 2.7mH R_ser=30 Ohm, C_par=1.5pF -- antenna voltage swing is 1200 Vpp
Results are still far from perfect. Will try to tune for smaller inductor current do drive delay.